新居 徹哉
| 氏名 | 新居 徹哉 |
|---|---|
| 職名 | 准教授 |
| 学位・資格 | 修士(理工学),テクニカルエンジニア(エンベデッドシステム) |
| 専門分野 | 制御工学,計測工学,ロボット工学 |
| 主な担当科目 | 学科:コンピュータ工学,制御工学 実技:システム制御実習 |
| 所属学会・協会 | 日本ロボット学会 計測自動制御学会 |
【教育・技術・シーズの紹介】
「ロボット・制御コントローラ開発,制御工学,計測,画像処理など」
組み込みシステムの開発とロボット制御への応用,各種制御システムの開発などに取り組んでいます.制御プログラムのための技術応用,パソコン利用制御システムの開発などにも取り組んでいます.
利用開発環境 VisualStudio(Windows PC),ARM mbed,PIC(マイコン,IoT),Unity,Tensorflow(AI),OpenCV(画像処理),Solidworks,Fusion360(3D設計・データ製作),3Dプリンタ(FDM),協働ロボット(DENSO Cobotta),RoboDK(ROBOT CAD)
過去研究・開発例
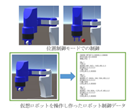
[1]2輪倒立振子型移動ロボット(小型AGV) 人共存環境での軽量物搬送目的の移動ロボットとして開発しました.パソコンまたはマイコン制御で動きます.
[2]画像処理・機械学習(Deep Learning)を用いた物体選別ロボット パソコン用USBカメラの画像から画像処理で物体を検出し,ロボットで仕分けるシステムです.仕分け対象については画像データを蓄積し,TensorFlowによる機械学習により仕分け精度を上げていくよう,学習システムと連携するように開発しました.(平成28年卒業研究)
[3]Unityを用いた3Dグラフィックシステムと連携する制御システム ゲームエンジンUnityの機能を利用した,リアルタイム性が高く,表現力に優れた制御システムの開発に取り組んでいます.UnityのVR機能を利用して仮想空間上でのロボット操作なども可能とします.(令和元年卒業研究)
[1]

[2]

[3]
お問い合わせはこちらから
![]()